
A pinch (alternately called a “knot,” “Bennett pinch”[1] (after Willard Harrison Bennett), “electromagnetic pinch”[2], “magnetic pinch”[3], the “pinch effect”[4] or “plasma pinch”[5]) is the compression of an electrically conducting filament by magnetic forces. The conductor is usually a plasma, but could also be a solid or liquid metal. In a z-pinch, the current is axial (in the z direction in a cylindrical coordinate system) and the magnetic field azimuthal; in a theta-pinch, the current is azimuthal (in the theta direction in cylindrical coordinates) and the magnetic field is axial.
Pinches occur naturally in electrical discharges such as lightning bolts[6], the aurora[7], current sheets[8], and solar flares[9]. They are also produced in the laboratory, primarily for research into fusion power, but also by hobbyists.
Contents
Pinch production and types
Pinches are created in the laboratory in equipment related to nuclear fusion, such as the Z-pinch machine and high-energy physics, such as the dense plasma focus. Pinches may also become unstable[10], and generate radiation across the electromagnetic spectrum, including radio waves, x-rays[11] and gamma rays[12], and also neutrons[13] and synchrotron radiation[14]. Types of pinches, that may differ in geometry and operating forces[15], include the Cylindrical pinch, Inverse pinch, Orthogonal pinch effect, Reversed field pinch, Sheet pinch, Screw pinch[16] (also called stabalized z-pinch, or θ-z pinch)[17], Theta pinch (or thetatron[18]), Toroidal pinch, Ware pinch [19], fountain pinch,[20] and Z-pinch.
Pinches are used to generate X-rays, and the intense magnetic fields generated are used in electromagnetic forming of metals (they have been demonstrated in crushing aluminium soft drinks cans[21]). They have applications to particle beams[22] including particle beam weapons[23], and astrophysics[24].
History

Thereafter, the experimental and theoretical progress on pinches was driven by fusion power research. In their article on the “Wire-array z-pinch: a powerful x-ray source for ICF”, M G Haines et al, wrote on the “Early history of z-pinches”[32]:
- In 1946 Thompson and Blackman [43] submitted a patent for a fusion reactor based on a toroidal z-pinch [43][33] with an additional vertical magnetic field. But in 1954 Kruskal and Schwarzchild [44][34] published their theory of MHD instabilities in a z-pinch. In 1956 Kurchatov gave his famous Harwell lecture showing nonthermal neutrons and the presence of m = 0 and m = 1 instabilities in a deuterium pinch [45][35]. In 1957 Pease [46][36] and Braginskii [47][37] independently predicted radiative collapse in a z-pinch under pressure balance when in hydrogen the current exceeds 1.4 MA. (The viscous rather than resistive dissipation of magnetic energy discussed above and in [32][38] would however prevent radiative collapse). Lastly, at Imperial College in 1960, led by R Latham, the Rayleigh–Taylor (RT) instability was shown, and its growth rate measured in a dynamic z-pinch [48][39].”
Formal treatment
The Bennett Relation
Consider a cylindrical column of fully ionized plasma, with an axial electric field, producing an axial current density, j, and associated azimuthal magnetic field, B. As the current flows through its own magnetic field, a pinch is generated with an inward radial force density of j x B. In a steady state with forces balancing:
- ∇p = ∇(pe + pi) = j x Β
where ∇p is the magnetic pressure gradient, pe and pi is the electron and ion pressures. Then using Maxwell’s equation ∇ x B = μ0 j and the ideal gas law p = N k T, we derive:
- \(2 N k(T_e + T_i) = \frac{{\mu_0}} {4 \pi} I^2\) (The Bennett Relation)
where N is the number of electrons per unit length along the axis, Te and Ti are the electron and ion temperatures, I is the total beam current, and k is the Boltzmann constant.
The Generalized Bennett Relation
The Generalized Bennett Relation considers a current-carrying magnetic-field-aligned cylindrical plasma pinch undergoing rotation at angular frequency ω. Along the axis of the plasma cylinder flows a current density jz, resulting in a toroidal magnetίc field Βφ. Originally derived by Witalis, [40] the Generalized Bennett Relation results in [41]:
- \(\frac{1}{4} \frac{\partial^2 J_0}{\partial t^2} = W_{\perp k i n} + \Delta W_{E_z} + \Delta W_{B_z} + \Delta W_k – \frac{{\mu_0}} {8 \pi} I^2 (a)\)
\(.\qquad \qquad – \frac{1}{2}G\overline{m}^2 N^2 (a) + \frac{1}{2}\pi a^2 \epsilon_0 \left(E_r^2 (a) – E_\phi^2 (a) \right )\)
- where a current-carrying, magnetic-field-aligned cylindrical plasma has a radius a,
- J0 is the total moment of inertia with respect to the z axis,
- W⊥kin is the kinetic energy per unit length due to beam motion transverse to the beam axis
- WBz is the self-consistent Bz energy per unit length
- WEz is the self-consistent Ez energy per unit length
- Wk is thermokinetic energy per unit length
- I(a) is the axial current inside the radius a (r in diagram)
- N(a) is the total number of particles per unit length
- Er is the radial electric field
- Eφ is the rotational electric field
The positive terms in the equation are expansional forces while the negative terms represent beam compressional forces.
The Carlqvist Relation

The Carlqvist Relation, published by Per Carlqvist in 1988[42], is a specialization of the Generalized Bennett Relation (above), for the case that the kinetic pressure is much smaller at the border of the pinch than in the inner parts. It takes the form
- \(\frac{{\mu_0}} {8 \pi} I^2 (a) +\frac{1}{2}G\overline{m}^2 N^2 (a) = \Delta W_{B_z} + \Delta W_k\)
and is applicable to many space plasmas.
The Carlqvist Relation can be illustrated (see right), showing the total current (I) versus the number of particles per unit length (N) in a Bennett pinch. The chart illustrates four physically distinct regions. The plasma temperature is quite cold (Ti = Te = Tn = 20 K), containing mainly hydrogen with a mean particle mass 3×10-27 kg. The thermokinetic energy Wk >> π a2 pk(a). The curves, ΔWBz show different amounts of excess magnetic energy per unit length due to the axial magnetic field Bz. The plasma is assumed to be non-rotational, and the kinetic pressure at the edges is much smaller than inside.
Chart regions: (a) In the top-left region, the pinching force dominates. (b) Towards the bottom, outward kinetic pressures balance inwards magnetic pressure, and the total pressure is constant. (c) To the right of the vertical line ΔWBz=0, the magnetic pressures balances the gravitational pressure, and the pinching force is negligible. (d) To the left of the sloping curve ΔWBz=0, the gravitational force is negligible. Note that the chart shows a special case of the Carlqvist relation, and if it is replaced by the more general Bennett relation, then the designated regions of the chart are not valid.
Carlqvist further notes that by using the relations above, and a derivative, it is possible to describe the Bennett pinch, the Jean’s criterion (for gravitational instability [43], in one and two dimensions), force-free magnetic fields, gravitationally balanced magnetic pressures, and continuous transitions between these states.
Crushing cans with the pinch effect
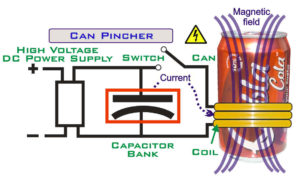
An electromagnetic aluminium can crusher consists of four main components (1) A high voltage DC power supply which provides a source of electrical energy (2) A large energy discharge capacitor to accumulate the electrical energy (3) A high voltage switch or spark gap and (4) A robust coil through which the stored electrical energy can be quickly discharged in order to generate a correspondingly strong pinching magnetic field (see diagram below).
In practice, such a device is somewhat more sophisticated than the schematic diagram suggests, including electrical components that control the current in order to maximize the resulting pinch, and to ensure that the device works safely. For more details, see the notes [44].
Sam Barros’s can crusher cost about $500, and uses the second largest SCR in production and a 900 Volt capacitor bank storing about 3000 Joules of energy. For a very short time, it generates a magnetic field 250,000 times the strength of the Earth’s magnetic field and a power of about 22 megawatts. [45]
Trivia
Pinch-generating equipment was used in Ocean’s Eleven, where it was used to disrupt Las Vegas’s power grid just long enough for the characters to begin their heist.
Notes

- ↑ See for example, Buneman, O., “The Bennett Pinch” (1961) Plasma Physics, Edited by James E. Drummond. LOC 60-12766. Publ. McGraw-Hill, Inc., New York, 1961, p.202
- ↑ Lee, S., “Energy balance and the radius of electromagnetically pinched plasma columns” (1983) Plasma Physics, Volume 25, Issue 5, pp. 571-576 (1983).
- ↑ Schmidt, Helmut, “Formation of a Magnetic Pinch in InSb and the Possibility of Population Inversion in the Pinch” (1966) Physical Review, vol. 149, Issue 2, pp. 564-573
- ↑ Severnyi, A. B., “On the Appearance of Cosmics Rays in the Pinch Effect in Solar Flares” (1959) Soviet Astronomy, Vol. 3, p.887
- ↑ Zueva, N. M.; Solov’ev, L. S.; Morozov, A. I. “Nonlinear instability of plasma pinches” (1976) Journal of Experimental and Theoretical Physics Letters, Vol. 23, p.256
- ↑ Rai, J.; Singh, A. K.; Saha, S. K, “Magnetic field within the return stroke channel of lightning” (1973) Indian Journal of Radio and Space Physics, vol. 2, Dec. 1973, p. 240-242.
- ↑ Galperin, Iu. I.; Zelenyi, L. M.; Kuznetsova, M. M. “Pinching of field-aligned currents as a possible mechanism for the formation of raylike auroral forms” (1986) Kosmicheskie Issledovaniia (ISSN 0023-4206), vol. 24, Nov.-Dec. 1986, p. 865-874. In Russian.
- ↑ Syrovatskii, S. I. “Pinch sheets and reconnection in astrophysics” (1981) In Annual review of astronomy and astrophysics. Volume 19. (A82-11551 02-90) Palo Alto, CA, Annual Reviews, Inc., 1981, p. 163-229
- ↑ Airapetyan, V. S.; Vikhrev, V. V.; Ivanov, V. V.; Rozanova, G. A. “Pinch Mechanism of Energy Release of Stellar Flares” (1990) Astrophsyics (Tr. Astrofizika) v.32 No.3 Nov. p.230 1990
- ↑ Hardee, P. E., “and pinching instability of supersonic expanding jets in extragalactic radio sources” (1982) Astrophysical Journal, Part 1, vol. 257, June 15, 1982, p. 509-526
- ↑ Pereira, N. R., et al, “[X rays from z-pinches on relativistic electron-beam generators]” (1988) Journal of Applied Physics (ISSN 0021-8979), vol. 64, Aug. 1, 1988, p. R1-R27
- ↑ Wu, Mei; Chen, Li; Li, Ti-Pei, “Polarization in Gamma-Ray Bursts Produced by Pinch Discharge” (2005) Chinese Journal of Astronomy & Astrophysics, Vol. 5, p. 57-64
- ↑ Anderson, Oscar A., et al, “Neutron Production in Linear Deuterium Pinches” (1958) Physical Review, vol. 110, Issue 6, pp. 1375-1387
- ↑ Peratt, A.L., “Synchrotron radiation from pinched particle beams“, (1998) Plasma Physics: VII Lawpp 97: Proceedings of the 1997 Latin American Workshop on Plasma Physics, Edited by Pablo Martin, Julio Puerta, Pablo Martmn, with reference to Meierovich, B. E., “Electromagnetic collapse. Problems of stability, emission of radiation and evolution of a dense pinch” (1984) Physics Reports, Volume 104, Issue 5, p. 259-346.
- ↑ Carlqvist, Per, “Cosmic electric currents and the generalized Bennett relation” (1988) Astrophysics and Space Science (ISSN 0004-640X), vol. 144, no. 1-2, May 1988, p. 73-84
- ↑ Srivastava, K. M.; Vyas, D. N., “Non-linear analysis of the stability of the screw pinch“, (1982) Astrophysics and Space Science, vol. 86, no. 1, Aug. 1982, p. 71-89
- ↑ See “[http://silas.psfc.mit.edu/introplasma/chap4.html#tth_sEc4.7 MHD Equilibria” in Introduction to Plasma Physics by I.H.Hutchinson (2001)
- ↑ See Dictionary of Material Science and High Energy Physics p.315 ISBN 0-8493-2889-6
- ↑ Helander, P. et al “The effect of non-inductive current drive on tokamak transport” (2005) Plasma Physics and Controlled Fusion, Volume 47, Issue 12B, pp. B151-B163
- ↑ Dr. Winston H. Bostick, “The Pinch Effect Revisited“,FULL TEXT PDF International Journal of Fusion Energy, Vol.1 No.1, March 1977, page 17
- ↑ For example, see “Electromagnetic Crusher“
- ↑ Ryutov, D. D.; Derzon, M. S.; Matzen, M. K, “The physics of fast Z pinches” (2000) Reviews of Modern Physics, vol. 72, Issue 1, pp. 167-223
- ↑ Andre Gsponer, “Physics of high-intensity high-energy particle beam propagation in open air and outer-space plasmas” (2004) http://arxiv.org/abs/physics/0409157
- ↑ Peratt, Anthony L., “The role of particle beams and electrical currents in the plasma universe” (1988) Laser and Particle Beams (ISSN 0263-0346), vol. 6, Aug. 1988, p. 471-491.
- ↑ See also the IEEE History Center, “Evolution of the IEEE Logo” March 1963; see also the comments in “Laboratory Astrophysics“
- ↑ van Marum M 1790 Proc. 4th Int. Conf. on Dense Z-Pinches (Vancouver 1997) (Am. Inst. Phys. Woodbury, New York, 1997) Frontispiece and p ii
- ↑ Tom Dolan, “Chapter 12. Pinches and Compact Toruses” (1982) Fusion Research FULL TEXT. Notes: The history of fusion research with pinch devices is summarized by: R, J. Bickerton, “Pinch Research”, Nuclear Fusion 20, 1072-1075 (1980).
- ↑ Pollock J A and Barraclough S, 1905 Proc. R. Soc. New South Wales 39 131
- ↑ R. S. Pease, “The Electromagnetic Pinch: From Pollock to the Joint European Torus“, “Pollock Memorial Lecture for 1984 delivered at the University of Sydney, 28 November, 1984″: This review of the electromagnetic pinch starts with an exhibit taken from Pollock’s work, carefully preserved and drawn to attention of modern research by Professor C. Watson-Munro. It is a compressed and distorted length of copper tube originally part of the lightning conductor on the Hartley Vale kerosene refinery in New South Wales. It was known to have been struck by lightning. Pollock and Barraclough (1905) from the Department of Mechanical Engineering at Sydney University carried out an analysis to see whether or not the compression could have arisen from the flow of electric current. They concluded that the compressive forces, due to the interaction of the large current flow with its own magnetic field could have been responsible for the compression and distortion. As far as I know, this is the first identified piece of observational data on the electromagnetic pinch; and the first theoretical discussion of the effect.
- ↑ Northrupp E F 1907 “Some Newly Observed Manifestations of Forces in the Interior of an Electric Conductor” (1907) Phys. Rev. 24 474. He wrote: “Some months ago, my friend, Carl Hering, described to me a surprising and apparently new phenomenon which he had observed. He found, in passing a relatively large alternating current through a non-electrolytic, liquid conductor contained in a trough, that the liquid contracted in cross-section and flowed up hill lengthwise of the trough… Mr. Hering suggested the idea that this contraction was probably due to the elastic action of the lines of magnetic force which encircle the conductor… As the action of the forces on the conductor is to squeeze or pinch it, he jocosely called it the ‘pinch phenomenon’.
- ↑ W.H.Bennett, “Magnetically Self-Focussing Streams“, Phys. Rev. 45 890 (1934)
- ↑ M G Haines, T W L Sanford and V P Smirnov, “Wire-array z-pinch: a powerful x-ray source for ICF” (2005) Plasma Phys. Control. Fusion 47 B1-B11 (online in full, click PDF).
- ↑ Thompson G P and Blackman M 1946 British Patent 817681. Haines M G 1996 “Historical Perspective: Fifty years of controlled fusion research” Plasma Phys. Control. Fusion 38 643
- ↑ Kruskal M D and Schwarzchild “Some Instabilities of a Completely Ionized Plasma” 1954 Proc. R. Soc. Lond. A 223 348
- ↑ Kurchatov I V 1957 J. Nucl. Energy 4 193
- ↑ Pease R S “Equilibrium Characteristics of a Pinched Gas Discharge Cooled by Bremsstrahlung Radiation” 1957 Proc. Phys. Soc. Lond. 70 11
- ↑ Braginskii S I 1957 Zh. Eksp. Teor. Fiz 33 645; Braginskii S I 1958 Sov. Phys.—JETP 6 494
- ↑ Haines M G et al 2005 Phys. Rev. Lett. submitted; see also EPS Conf. on Plasma Physics 2004 (London, UK) paper 73
- ↑ Curzon F L et al “Experiments on the Growth Rate of Surface Instabilities in a Linear Pinched Discharge” 1960 Proc. R. Soc. Lond. A 257 386
- ↑ Witalis, E. A. “Plasma-physical aspects of charged-particle beams” (1981) Physical Review A – General Physics, 3rd Series, vol. 24, Nov. 1981, p. 2758-2764
- ↑ Anthony L . Peratt, “Physics of the Plasma Universe”, 1992 Springer-Verlag, ISBN 0-387-97575-6
- ↑ Carlqvist, Per, “Cosmic electric currents and the generalized Bennett relation” (1988) Astrophysics and Space Science (ISSN 0004-640X), vol. 144, no. 1-2, May 1988, p. 73-84
- ↑ J. H. Jeans, “The stability of a spherical nebula” Phil. Trans. R. Soc. Lond. A 199 (1902)
- ↑ Examples of electromagnetic pinch can crushers can be found at (a) Bob LaPointe’s site on High Voltage Devices and Experiments (b) Tristran’s Electromagnetic Can Crusher (including schematic) (c) Sam Borros’s Solid State Can Crusher
- ↑ Sam Borros’s PowerLabs’ Solid State Can Crusher
- ↑ Trubnikov, Boris A., “A new hypothesis of cosmic ray generation in plasma pinches” (1992) IEEE Transactions on Plasma Science (ISSN 0093-3813), vol. 20, no. 6, p. 898-904.
- ↑ “The PLASMAK™ Configuration and Ball Lightning” (PDF) presented at the International Symposium on Ball Lightning; July 1988
See also
- Madison Symmetric Torus (Reversed field pinch, How to make a toroidal pinch)
- Z-pinch
- Pinch (magnetic fusion)